Canadese onderzoekers laten zien wat lang onmogelijk leek: een drone die bij snelwegtempo perfect neerstrijkt op een rijdende auto. Een knap staaltje techniek kan de toekomst van drones voorgoed veranderen, en de beelden zijn best spectaculair.
Een team van onderzoekers aan de Université de Sherbrooke in Canada heeft een wereldprimeur gerealiseerd. Hun experimentele quadcopter, genaamd DART (Direct Approach Rapid Touchdown), kan veilig landen op een voertuig dat met 110 km/u over de weg rijdt.
Volgens de studie, gepubliceerd in het Journal of Field Robotics, wist de DART tijdens experimenten van het Createk Research Lab maar liefst 38 keer achter elkaar succesvol te landen op de laadbak van een pickup-truck die met autosnelwegtempo reed. Een prestatie die tot nu toe als fysiek onhaalbaar werd beschouwd.
Oud probleem
Landen op een bewegend voertuig is al jaren een van de grootste uitdagingen in de dronewereld. Bij hoge snelheden moet een drone sterk voorover kantelen om luchtweerstand te overwinnen, waardoor de propellers gevaarlijk dicht bij het oppervlak komen. Klassieke landingspoten breken dan vaak of zorgen dat de drone weer van het doel stuitert.
Slimme oplossing
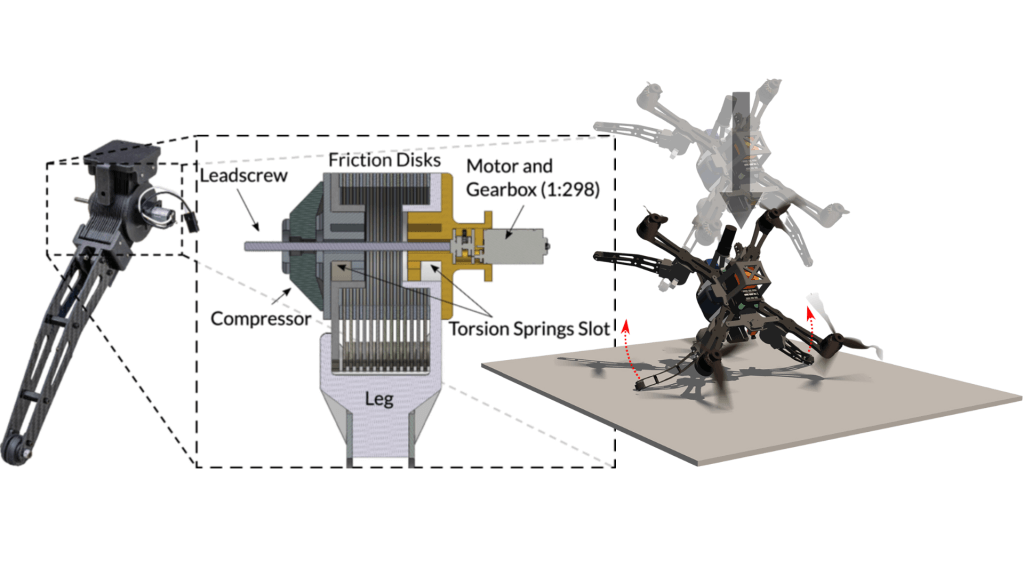
Het team uit Sherbrooke vond een elegante oplossing: een combinatie van wrijvingsgebaseerde schokdempers en omgekeerde stuwkrachtcontrole.
Deze twee innovaties laten de drone de impact opvangen en zich vastzetten zonder te glijden of terug te veren.
“Onze aanpak combineert een snelle duikvlucht, lichte frictiedempers en onmiddellijke stuwkrachtomkering bij contact,” legt promovendus Isaac Tunney uit, die het project leidde samen met John Bass en Alexis Lussier Desbiens. “Daardoor wordt de landing robuuster bij windvlagen, sensorfouten en onvoorspelbare voertuigbewegingen.”
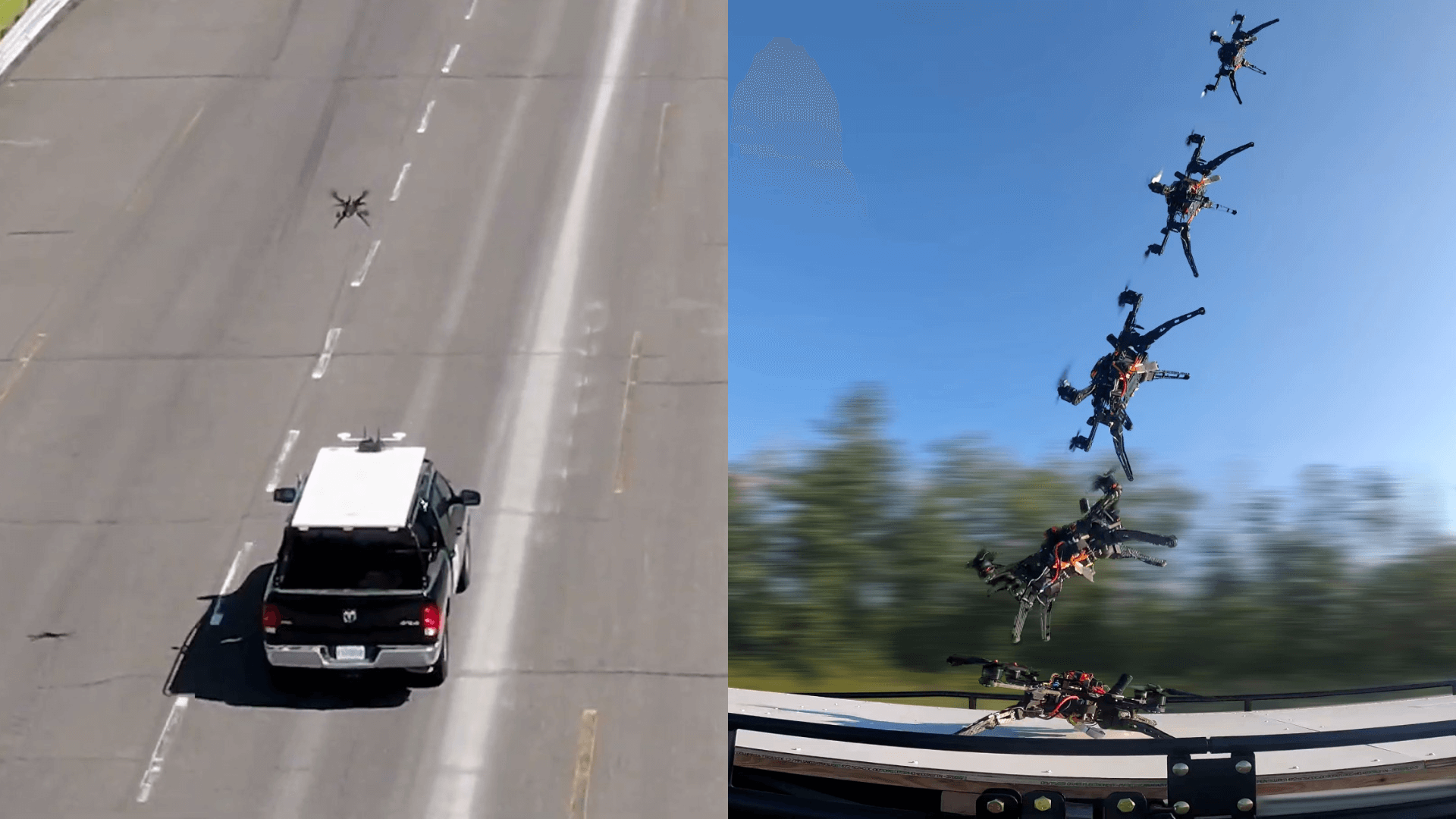
Bekijk de beelden
De 2,4 kilogram zware DART begint zijn landing door de beweging van het voertuig van bovenaf te volgen. Zodra de timing klopt, voert hij een steile duikvlucht uit die hem stabiel houdt in turbulente lucht. Vlak voor contact trekt de drone zijn neus recht — een manoeuvre die ervoor zorgt dat alle vier de poten tegelijk het oppervlak raken.
Op dat moment doen de wrijvingsdempers en de omgekeerde stuwkracht hun werk: de eerste absorberen de klap, de tweede drukken de drone stevig tegen de auto. Zo blijft hij stabiel, zelfs wanneer het voertuig accelereert of over oneffen wegdek rijdt.
Goedkoop en breed toepasbaar
De toepassingen van deze techniek reiken ver. In militaire operaties kan een drone als DART onderweg informatie verzamelen en landen op een rijdend commandovoertuig.
In de logistiek zouden drones pakketten kunnen overdragen aan vrachtwagens die niet hoeven te stoppen, wat tijd en energie bespaart. Ook voor reddingsdiensten biedt de techniek uitkomst in ruig terrein of op zee, waar stilstand vaak onmogelijk is.
Omdat het systeem grotendeels bestaat uit standaardonderdelen, is het licht, efficiënt en goedkoop te integreren. Volgens de onderzoekers is het landing envelope, het bereik van snelheden en hoeken waarin een drone veilig kan landen maar liefst 38 keer groter dan bij conventionele ontwerpen.

Altijd mobiele robotica
Met DART tonen de Canadese onderzoekers aan dat drones niet langer gebonden hoeven te zijn aan vaste landingsplaatsen. Ze bewegen mee met de wereld om hen heen: dynamisch, zelfstandig en voortdurend verbonden. Daarmee komt de visie van altijd mobiele robotica plots een stuk dichterbij.