Auto’s en vrachtwagens kunnen steeds meer zelf. Toch is de stap naar volledige autonoom rijden nog een brug te ver. De ontwikkeling staat echter niet stil en op de TU Delft geeft de Intelligent Vehicles-groep van het Robotics Lab een update.
Veiligheid is een heel belangrijke uitdaging en het overlijden van een vrouw in de Verenigde Staten in 2018 betekende een flinke stap terug. Deze mevrouw werd door een autonome auto aangereden terwijl ze overstak. Een autonome auto heeft daarom ogen en oren nodig. Dat kunnen sensoren zijn die je dan op het voertuig bevestigt. Andere uitdagingen waaraan gewerkt wordt zijn hoe een voertuig kan ‘horen’, een op afstand bestuurbare auto, wagenziekte voorkomen, platooning, onverwachte situaties, rekening houden met andere voertuigen én met fietsers. Een ‘slimme’ fiets die stabiel is, is in ontwikkeling. De grootste uitdaging van alles is toch wel de schaalbaarheid.
Toyota Prius
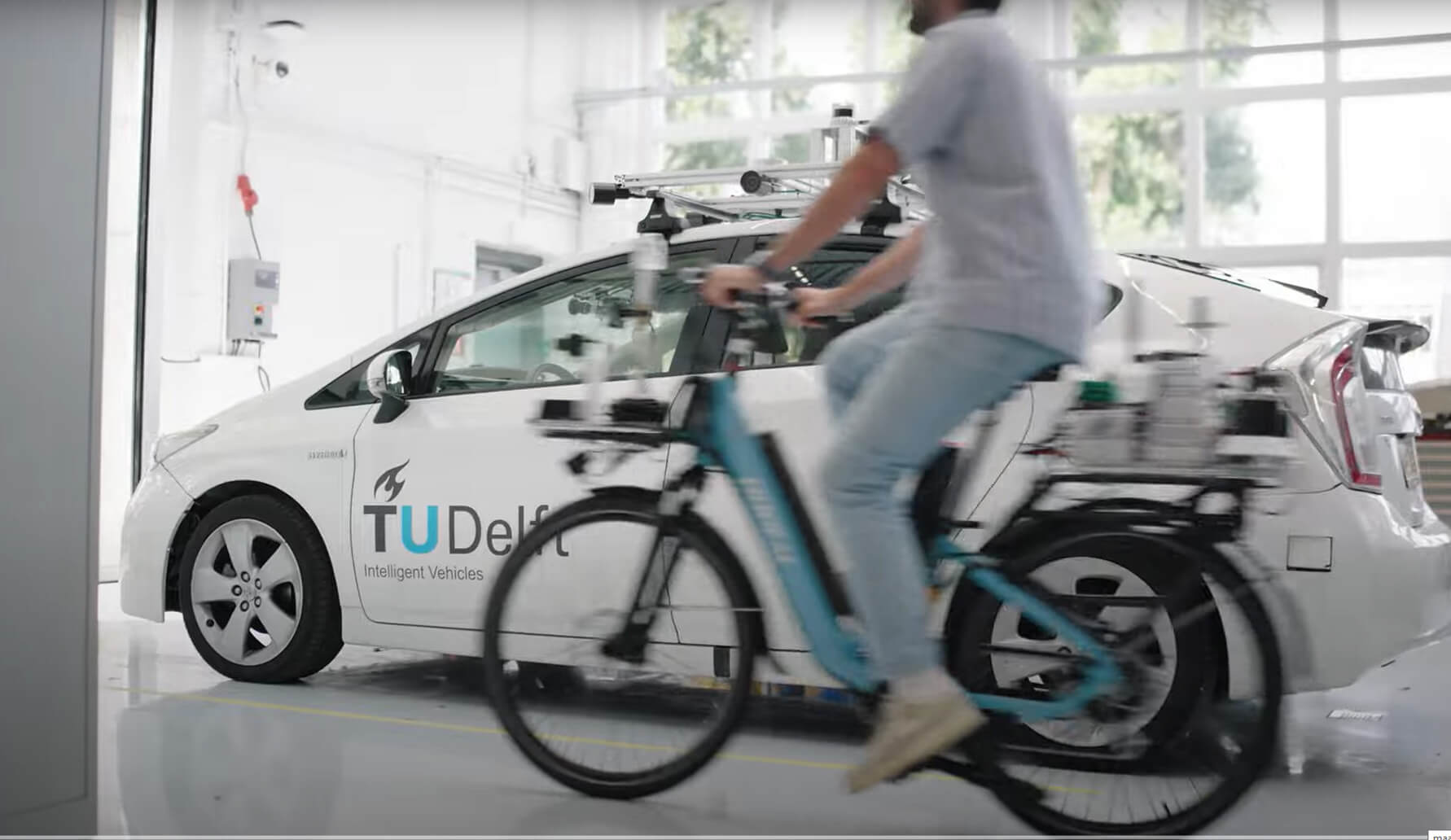
Op de campus van TU Delft trekt de Toyota Prius flink wat aandacht door alles wat op en om de auto zit. Prof. dr. Dariu Gavrila legt uit: ‘Er zitten twee verschillende sensoren op die verbonden zijn met LiDAR. De bovenste is verticaal gericht, waarmee ook bijvoorbeeld gebouwen met meerdere verdiepingen kunnen worden onderscheiden. Deze sensor heeft wel een beperkte reikwijdte. De sensor aan de voorkant reikt verder, maar met een kleiner beeld. Daarnaast zijn er acht camera’s rondom de auto, waardoor we 360 graden zicht hebben. Een noviteit zijn de microfoons op de auto, die geluiden waarnemen. Achter de bumper zit de 4D-radar. Achter in de auto zitten de ‘hersens’ in de vorm van een computer waar al deze sensors samenkomen. Zo weet de auto waar hij is en wat er in de omgeving gebeurt.’ Achter het stuur zit geen persoon, maar wel metalen benen die gas geven en remmen en hij stuurt automatisch. Uiteraard is het een automaat. Ronald Ensing vertelt over de software: ‘De sensoren scannen de omgeving met 10 Hertz en een 3D-beeld. Met deep learning is de software getraind om de objecten te zien en daarop te reageren. De auto voorspelt hoe de fietser waarschijnlijk zal gaan reageren en houdt daar rekening mee.’

Op afstand bestuurbare auto
Wat als een chauffeur in een kamer kan zitten om een auto te besturen? Daar houdt assistent professor Georgios Papaioannou zich mee bezig: ‘De menselijke component blijft voorlopig nog wel nodig, want wat als de camera’s op een auto bevroren zijn? Dan kun je niets. We zijn nu bezig met auto’s die op afstand bestuurd kunnen worden. Daarvoor is het wel nodig dat de bestuurder alles ziet, hoort en voelt alsof die in de auto zit. Om die transmissie juist te krijgen, moet dat in real time gebeuren. Een seconde tijdsverschil kan grote gevolgen hebben. Pas dan kan de chauffeur op afstand accuraat reageren. Het is nog niet zover dat dat al kan, maar we testen wel de mogelijkheden.’ In Estland worden die testen wel gedaan met deze auto’s. Daar is al gebleken dat er amper tijdsverschil is. Het is daar veilig bevonden. Om de bestuurder toch het gevoel te geven dat diegene in de auto zit, staan er drie schermen waarop die kan kijken. Emma Schippers studeert binnenkort af op dit onderdeel en zij legt uit: ‘De rijders zitten op een platform waarop de bewegingen van chauffeurs zijn nagebootst. In de auto die bestuurd wordt, zitten camera’s en microfoons, waardoor het lijkt alsof je in de echte auto zit. Met een toetsenbord en een 5G-verbinding heeft de chauffeur volledige controle over de auto. De systemen die we in de verschillende onderzoeken gebruiken, zijn hetzelfde. In de toekomst hopen we hiermee auto’s veilig te laten rijden, waarbij de bestuurder comfortabel in zijn eigen huis kan zitten.’
Slimme fiets
Door fietsen veiliger te maken, neemt het aantal ongevallen flink af, verwachten de onderzoekers van TU Delft. Een van de manieren waarop dat zou kunnen is met een zelf stabiliserende fiets. Assistent professor Holger Caesar staat bij een fiets vol met sensors, antennes en andere snufjes: ‘We kunnen fietsen veiliger maken, bijvoorbeeld door dezelfde sensoren te gebruiken als die op de Toyota Prius zitten, waarmee de fiets zelf de omgeving ‘ziet’. Het idee achter alles is dat auto’s en fietsen met elkaar verbonden kunnen worden, waardoor fietsen weten dat er een auto aankomt. Het onderzoek vindt vooral plaats in landen met relatief weinig fietsers, daarom is Nederland zo aantrekkelijk om meer data te verkrijgen. De stad Delft hebben we inmiddels helemaal rondgefietst waardoor dit in kaart is. Volgend jaar gaan we verder met onderzoek naar geluiden om de fiets. Om dit echt van de grond te krijgen is er veel meer data rondom ongelukken nodig. Daarbij komt dat deze fiets zoals die er nu uitziet, erg groot en heel duur is.’
Wagenziekte
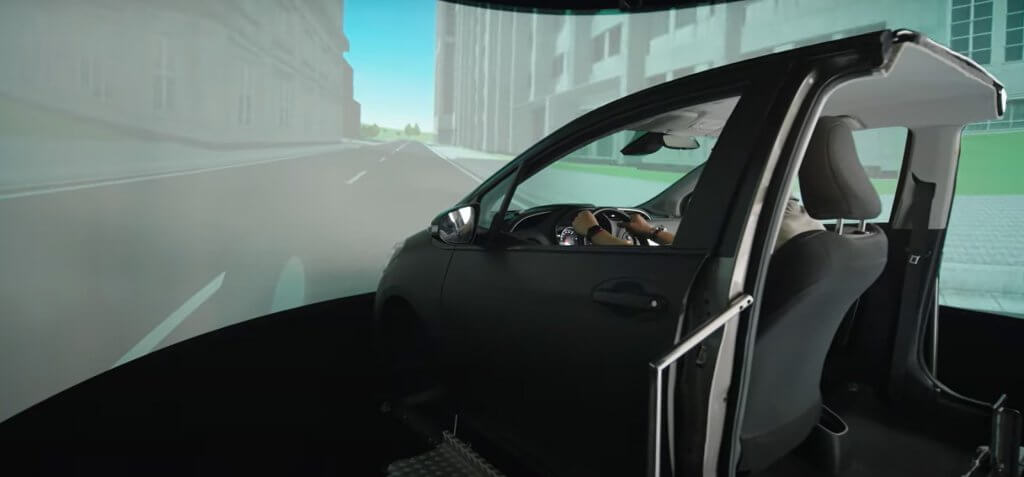
Assistent professor Barys Shyrokau doet onderzoek naar wagenziekte bij autonome auto’s. De praktijksituatie is met alleen de voorste helft van een auto op een platform nagebootst. ‘Twee op de drie mensen kunnen geen boek lezen in de auto of op hun telefoon zitten. Waarom zou je dan nog zelfrijdende auto’s maken? Daarom willen we zorgen voor meer comfort. Met meerdere bedrijven en onderzoeksteams werken we aan een oplossing. De gemiddelde auto is al een stuk comfortabeler dan auto’s uit de jaren 60 en 70. Om goed onderzoek te doen, moeten we de proefpersonen wel ziek maken, maar binnen zekere grenzen. We hopen binnen vijf jaar met een oplossing te komen. Wat we in ieder geval weten is dat langzamer rijden voor minder misselijkheid zorgt. Ons doel is om een schakel in je auto om te kunnen zetten, net zoals je bij cruise control doet, waarmee de auto stabieler is. Dat gaat dan over de verre toekomst.’
Platooning
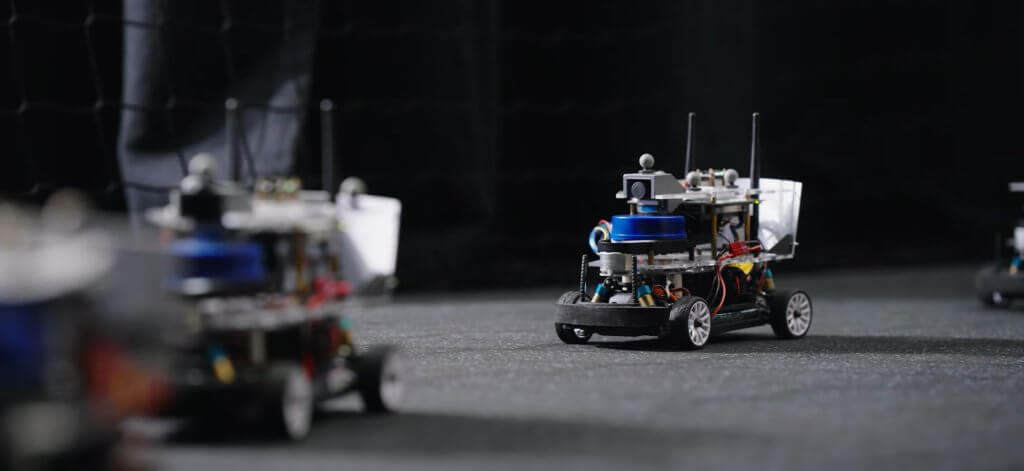
Over platooning lopen al veel langer onderzoeken, maar in de praktijk laat het op zich wachten. Ook op de TU Delft wordt onderzoek gedaan en assistent professor Laura Ferranti vertelt: ‘Met kleine vrachtautootjes die we in een gecontroleerde omgeving laten rijden, doen we testen. Platooning is een uitdaging. Wij wilden de autootjes met elkaar verbinden, zodat ze op elkaar kunnen reageren en dat is gelukt. Elk wagentje heeft zijn eigen cloud en een eigen LiDAR, in het klein zodat het betaalbaar blijft. Met sensoren aan boord kunnen ze met elkaar ‘communiceren’ en op elkaar reageren. Met een afstandsbediening bedienen mensen deze autootjes en ze kunnen elkaar inhalen. Mocht eentje het slachtoffer worden van een cyberaanval, kan die auto uitgeschakeld worden zodat de rest niet ook geïnfecteerd wordt.’
Acceptatie en samenwerking
Assistent professor Arkady Zgonnikov doet onderzoek naar de vraag of autonome voertuigen even goede chauffeurs zijn als mensen. ‘Dat is belangrijk om te weten, zeker voor de toekomstige gebruikers, de makers en om regelgeving te implementeren. Die is er nog amper, dat hangt ook af van allerlei fundamentele onderzoeken die we doen of in de toekomst plaatsvinden. Met diverse bedrijven samen deden we onderzoek om een wiskundige berekening te maken van het gedrag van bestuurders. Daarnaast is het minstens zo belangrijk dat andere weggebruikers de autonome voertuigen accepteren en ermee om kunnen gaan. Omdat we niet met deze wagens de weg op kunnen en mogen gaan, gebruiken we VR simulaties voor deze onderzoeken.’ Ook hier nemen twee vrijwilligers de proef op de som door plaats te nemen achter het stuur van de auto’s. Ze krijgen een 3D-bril op. Op de tafel staat een stuur en de pedalen staan op de grond. Op een scherm is te zien wat de bestuurder ziet, die gaat invoegen. Hij kijkt daadwerkelijk over zijn schouder, net als in een gewone auto.
Schaalbaarheid
De grootste uitdaging is het opschalen van autonoom rijden. Gavrila legt uit: ‘Europa loopt hierin nogal achter. In Amerika rijdt de Waymo, die eerst van Google was, en de Pony.ai in China. De onderzoeken in Europa worden veelal gestopt vanwege de kosten. Maar we zullen toch zelf aan de slag moeten, want wat in Amerika en China werkt, is niet automatisch geschikt voor Europa. Alleen al vanwege het verschil in wegen, reglementen en weggebruikers. Voertuigen moeten getraind worden met lokale data. De Waymo of Pony.ai kan niet zomaar hier rijden, dan krijg je ongelukken. Bedrijven die zich bezighouden met de ontwikkeling van autonome voertuigen draaien verlies en moeten dus over diepe zakken beschikken. Ook voor alle data die nodig is voor de training. Met LiDAR is er al een flinke slag gemaakt, maar er moet meer gebeuren. Daarvoor zijn niet alleen veel data uit Nederland nodig, maar ook uit andere landen in Europa. Daarbij rijst de vraag of wat in Nederland werkt, ook toepasbaar is in bijvoorbeeld Italië of zijn er andere data en training nodig voor verschillende landen. In ons land heeft een autonome auto met veel meer voetgangers en fietsers te maken dan in bijvoorbeeld Amerika. Om niet achter te blijven bij de rest van de wereld is meer onderzoek en vooral meer investering nodig.’