Drones die zelfstandig door kassen vliegen, industrieterreinen inspecteren of pakketjes afleveren, lijken steeds dichterbij te komen. Toch kampen veel autonome drones nog altijd met een fundamenteel probleem: navigatie kost veel rekenkracht, geheugen en energie. Onderzoekers van de TU Delft denken nu een veel efficiëntere oplossing te hebben gevonden door simpelweg naar honingbijen te kijken.
Samen met biologen van Wageningen University & Research en de Carl von Ossietzky Universität Oldenburg ontwikkelden de onderzoekers Bee Nav, een navigatiesysteem geïnspireerd op de manier waarop honingbijen hun weg terugvinden naar de korf. Het onderzoek verscheen onlangs in het wetenschappelijke tijdschrift Nature.
Het opvallende aan het systeem is vooral hoe weinig geheugen ervoor nodig is. Waar moderne drones vaak afhankelijk zijn van zware kaarten, krachtige processors en complexe sensoren, kan Bee Nav functioneren met een neuraal geheugen van slechts 42 kilobyte. Dat is minder opslagruimte dan een simpele afbeelding op een smartphone.
Navigeren zonder gps
Veel autonome systemen bouwen vandaag eerst een gedetailleerde kaart van hun omgeving op. Dat werkt goed in bijvoorbeeld zelfrijdende auto’s of magazijnrobots, maar vraagt veel energie en hardware. Vooral voor kleine drones is dat een probleem. Hoe zwaarder de elektronica, hoe korter de vliegtijd.
Honingbijen laten al miljoenen jaren zien dat het ook anders kan. Ondanks hun kleine hersenen vliegen ze probleemloos honderden meters ver om nectar te verzamelen, waarna ze vrijwel rechtstreeks terugkeren naar de korf. Dat doen ze onder meer via zogenaamde odometrie: het inschatten van afgelegde afstand en richting op basis van visuele bewegingen. Een soort natuurlijke stappenteller dus.
Alleen heeft dat systeem een nadeel. Kleine foutjes stapelen zich onderweg op, waardoor de positiebepaling steeds onnauwkeuriger wordt. Daarom combineren bijen die techniek met visuele herkenning van hun omgeving. Ze onthouden hoe bomen, struiken en andere herkenningspunten eruitzien rondom hun nest. Precies dat mechanisme probeerden de onderzoekers na te bootsen.
Eerst een leervlucht, daarna zelfstandig op pad
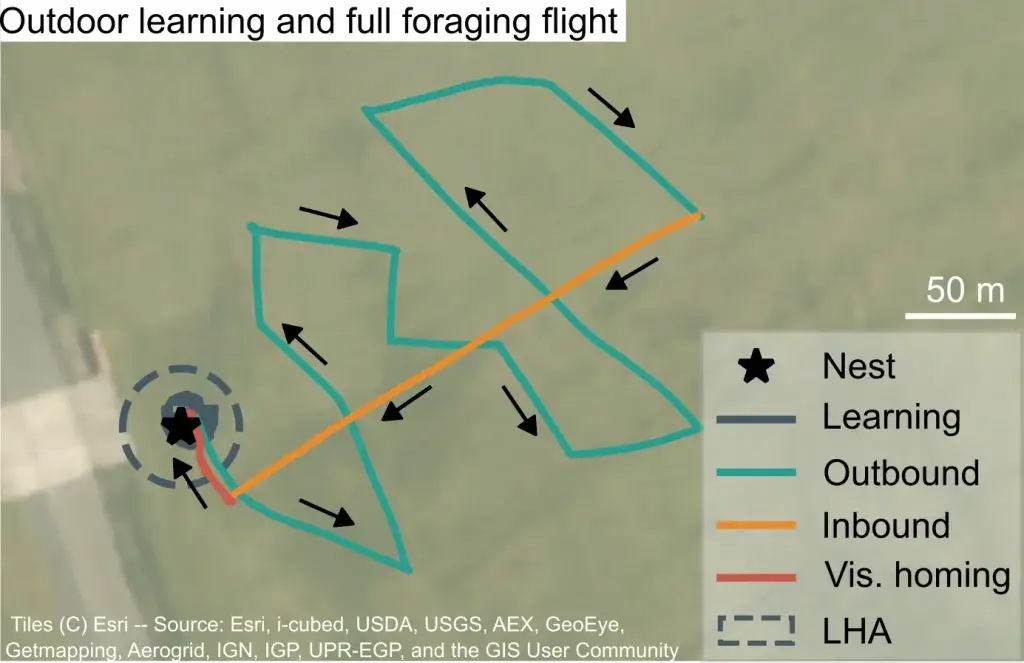
Voordat een honingbij voor het eerst echt uitvliegt, maakt ze korte rondjes rondom de korf. Daarbij bekijkt ze haar omgeving vanuit verschillende hoeken. Bee Nav werkt op dezelfde manier.
Een drone voert eerst een korte leervlucht uit rondom zijn startpunt. Tijdens die vlucht legt hij panoramische beelden vast van de omgeving. Een klein neuraal netwerk leert vervolgens hoe die beelden samenhangen met de richting en afstand naar huis. Daarna kan de drone zelfstandig veel grotere afstanden afleggen.
Volgens hoogleraar Guido de Croon was vooral de combinatie van visueel geheugen en odometrie interessant. Biologen weten al langer dat bijen beide technieken gebruiken, maar hoe ze precies samenwerken bleef grotendeels onbekend. Het onderzoek moest die ontbrekende schakel invullen.
Opmerkelijk genoeg bleek de drone ook goed te kunnen terugkeren wanneer de afstandsinschatting niet perfect was. Het systeem corrigeert zichzelf als het dichter bij de thuisbasis komt en meer visuele herkenningspunten ziet.
Meer dan 600 meter vliegen met 42 kilobyte geheugen
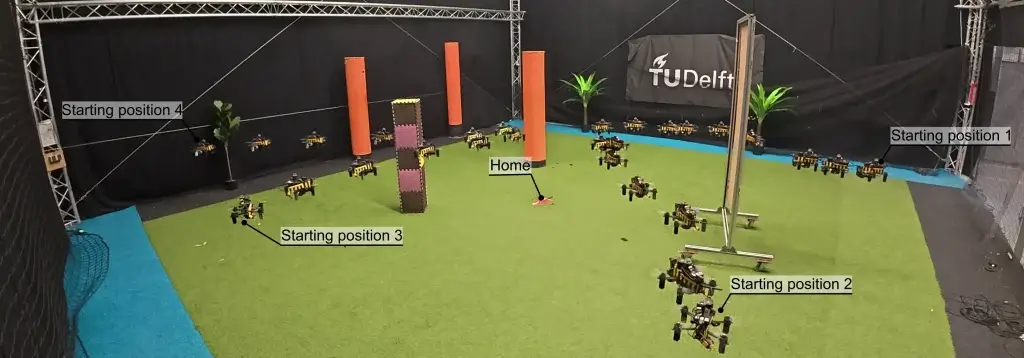
Na experimenten met kleine robots binnenshuis testten de onderzoekers het systeem ook buiten. Op drone testlocatie Unmanned Valley in Valkenburg vloog een drone meer dan 600 meter weg van zijn startpunt en wist daarna zelfstandig terug te keren. Dat alles met een neuraal netwerk van slechts 42 kilobyte groot.
Binnen in grote ruimtes, zoals hangars, werkte het systeem vrijwel foutloos. Buiten bleek vooral wind een uitdaging. Door windvlagen kantelde de drone soms, waardoor de camerabeelden moeilijker bruikbaar werden voor navigatie. In die omstandigheden daalde het succespercentage naar ongeveer 70 procent.
Volgens eerste auteur Dequan Ou zijn de resultaten desalniettemin veelbelovend, al moet het systeem nog robuuster worden voor gebruik in echte praktijkomgevingen.
Drones tussen de tomatenplanten
De onderzoekers zien vooral toepassingen in de landbouw. Kleine, lichte drones zouden bijvoorbeeld autonoom door kassen kunnen vliegen om gewassen te inspecteren. Daarmee kunnen ziektes of plagen vroegtijdig worden opgespoord, nog voordat ze zichtbaar worden voor menselijke medewerkers.
Dat soort drones moet licht, goedkoop en veilig zijn. Juist daarom is een extreem zuinig navigatiesysteem interessant. Minder rekenkracht betekent immers kleinere accu’s, lichtere hardware en langere vliegtijden.
De techniek sluit bovendien aan bij een bredere trend binnen robotica: steeds meer onderzoekers kijken opnieuw naar de natuur voor efficiënte oplossingen. Niet alleen bijen, maar ook vogels, vleermuizen en insecten inspireren tegenwoordig nieuwe generaties drones en autonome robots. Waar klassieke AI modellen steeds groter en zwaarder worden, laat Bee Nav juist zien dat slimme eenvoud soms effectiever kan zijn dan brute rekenkracht.