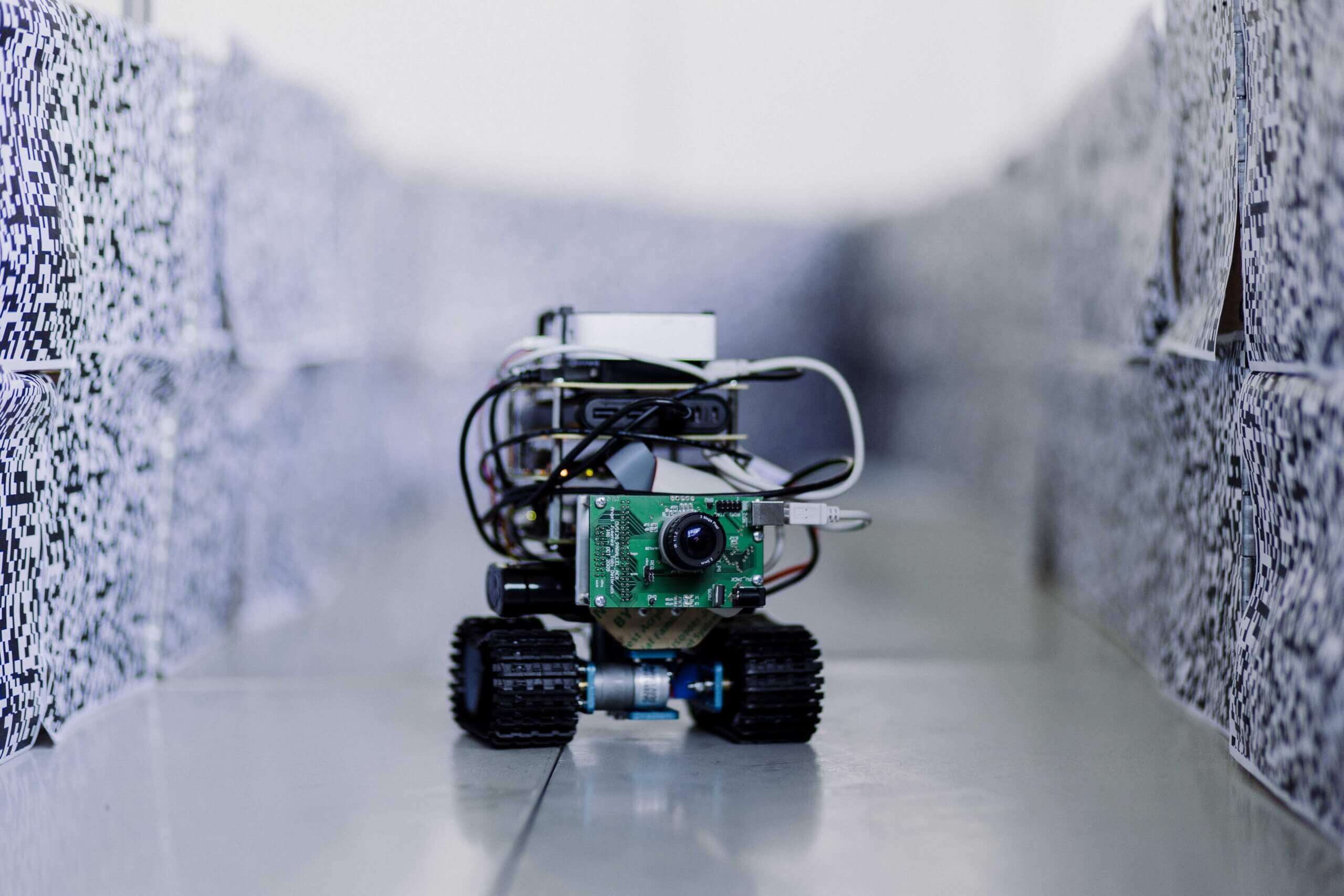
Hoe kunnen insecten met een minimale hersencapaciteit toch navigeren terwijl ze vliegen? Die vraag, en dan met name hoe hersenen functioneren en hoe de structuur van die hersenen is, interesseert prof. Elisabetta Chicca mateloos. Ze formuleerde een hypothese rond deze vraag en maakte met collega’s samen een insect als robot na.
Dieren verplaatsen zich in verschillende habitats, van kale landschappen tot zeer onoverzichtelijke terreinen, zoals bossen of gras- en bloemenweiden. Een cruciaal aspect van vliegende dieren, zoals insecten en vogels, is het vermijden van obstakels om schade aan de vleugels te voorkomen en een snelle voorwaartse beweging te maken. Het vermijden van obstakels vereist het bewaren van een veilige afstand tot omringende objecten, het identificeren van oversteekbare openingen tussen objecten en het snel afremmen als de vluchtcorridor te smal wordt of het uitvoeren van ontwijkende manoeuvres rond obstakels. De computationele mechanismen die ten grondslag liggen aan dit gedrag zijn essentieel voor het ontwikkelen van autonome robots die in complexe en onvoorspelbare omgevingen kunnen opereren.










